Descartes deja a un lado la relación que tiene con el mundo sensible, pues se da cuenta que ese ser que piensa tiene sensaciones. Sin embargo, todo aquello que sentimos proviene de algo ajeno a nuestra mente. Aquellas sensaciones no pueden ser controladas por nosotros, pues dependen de algo que no es nuestro pensamiento, y éste no puede decidir entre sentir una u otra cosa. De aquí, podríamos volver a la duda hiperbólica y pensar que esto que sentimos es un Dios que nos engaña o algo parecido.
Una vez que Descartes demuestra en la primera parte de Los principios de la filosofía que Dios no puede provocar o ser causa de ningún error deja de sospechar de todo. Desaparece la duda hiperbólica de esta manera, por conducto de Dios que le da la validez para ver todo clara y distintamente en el mundo que Él ha creado. Entonces, cuando nuestros sentidos perciben clara y distintamente un cuerpo extenso con longitud, anchura y profundidad no tenemos porque dudar de su existencia, y sin temor a equivocarnos, porque para Descartes Dios no puede engañarnos, "debemos concluir que existe una substancia extensa en longitud, latitud y profundidad, que existe en el presente en el mundo con todas las propiedades que manifiestamente conocemos que le pertenecen."
Características del mundo físico
Explica Descartes que a la mente llegan ideas de forma adventicia. Estas ideas tienen una forma de garantía que implica que esa idea sea igual para todos. Por tanto, hay una sustancia y permanece al cambio, ella es la extensión. La extensión se explica que sea igual para todos porque según Descartes la medida de cualquier objeto debe ser siempre la misma y será la misma para todos. Así, limita los objetos a cosas geométricas que cuentan con largo, ancho y profundidad.
Al distinguir un cuerpo lo que nuestros sentidos perciben son sus cualidades, pero para Descartes éstas no pueden determinar la naturaleza de los cuerpos. "La naturaleza del cuerpo solamente reside en ser una substancia extensa en longitud, anchura y profundidad." La extensión no es un accidente de la substancia material, sino que la extensión es la substancia material y la única manera de entender esta substancia corpórea es por medio de su extensión Para Descartes todo lugar en el universo esta ocupado por un cuerpo. "Todo los lugares están llenos de cuerpos" Todo cuerpo que hay en el universo ocupa un lugar en él. La dimensión del lugar que ocupa el cuerpo es proporcional al espacio de este cuerpo. Es decir, no puede ser mayor o menor el lugar que ocupa, la extensión de un cuerpo y el espacio de éste es proporcional a las dimensiones del lugar, no es posible que el lugar sea más grande al espacio que ocupa el cuerpo, o bien menor. Cada lugar en el universo esta relacionado con un cuerpo y sólo con uno. Por lo tanto, es imposible que dos cuerpos compartan un mismo lugar.
imposible que dos cuerpos compartan un mismo lugar.
Para Descartes la materia es infinitamente divisible. No existe algo parecido a un átomo o una medida mínima a la que se pueda reducir la materia, sin importar que tan pequeño sea un cuerpo, éste siempre será divisible. "También es muy fácilmente cognoscible que no existen átomos o partes de los cuerpos que sean indivisible". Ésta es la naturaleza de todo cuerpo con extensión, siempre se va a poder dividir.
Recordemos que para Descartes el fundamento de su ciencia se encuentra en el pensamiento, en este sentido si uno por medio del entendimiento concibe la idea de que un cuerpo puede ser dividido en dos o más partes, y que estas partes a su vez pueden ser divididas en dos o más y estas de igual manera, hasta el infinito, es muy claro que esta idea se genera en el pensamiento. Pero, explica también que si Dios creó una medida mínima en la que se puede dividir la materia, Él por ser omnipotente tiene la posibilidad de seguirla dividiendo infinitamente, en ese sentido la materia es infinitamente divisible. "La parte extensa más pequeña que pudiera ser en el mundo siempre puede ser dividida porque tal es en razón de su naturaleza
La tierra y los cielos están formados de una misma materia; que, aunque existiera una infinidad de mundos, estarían hechos de la misma materia.
Cualquier cuerpo que se de dentro de este universo tiene estas propiedades de la extensión y la infinita divisibilidad y por lo tanto forma parte de esta materia ilimitada que no deja lugar al vacío que conforma el universo. Por lo tanto, Descartes concluye que sólo hay una materia que ocupa todo el espacio imaginable en el universo, que es ilimitado
"Cada cosa permanece en el estado en el que está mientras que nada modifique ese estado."
Todo cuerpo que con su extensión que ocupa un espacio y se encuentra en movimiento o reposo, permanecerá en ese estado y no cambiará, hasta que una causa externa lo cambié ya sea en su extensión, espacio o movimiento. Así un cuadrado será cuadrado hasta que no haya una causa externa que lo modifique. Y si un cuerpo esta en reposo, permanecerá de esa manera hasta que una causa externa a él lo ponga en movimiento.
Siguiendo la primera ley, el movimiento que describe un cuerpo después de ser cambiado por causas externas de reposo a movimiento no puede depender del azar. El movimiento se determina por leyes inmutables, así el movimiento que seguirá el cuerpo será el de un línea recta. Incluso cuando el cuerpo es forzado a mantener un movimiento circular, si éste pudiese liberarse de esa fuerza trazaría en su nuevo movimiento una línea recta.
"Si un cuerpo en movimiento choca con otro más fuerte que él, no pierde nada de su movimiento; ahora bien, si encuentra otro más débil y que puede mover, pierde tanto movimiento como comunica al otro
una causa externa. El cambio de estado entre reposo o movimiento que se da en los cuerpos siempre es algo externo a ellos. No puede darse el caso de que un cuerpo en reposo comience a moverse por sí mismo, o uno en movimiento se detenga por sí solo, siempre será algo externo lo que cause el cambio
20 PREGUNTAS
9. COMPLETE:
TODO CUERPO QUE CON SU EXTENCION OCUPA UN ESPACIO SE ENCUENTRA EN MOVIMIENTO O REPOSO
10. VERDADERO O FALSO
El movimiento se determina por leyes inmutables
( VERDADERO)
12. DE QUE ESTA FORMADA LA TIERRA Y EL CIELO
si porque cada espacio se mantiene en movimiento











 ,
que es un vector de carácter deslizante y situado sobre el eje de
rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice
que el cuerpo «gira sobre sí mismo».
,
que es un vector de carácter deslizante y situado sobre el eje de
rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice
que el cuerpo «gira sobre sí mismo».


 , asociada al grupo de Lie SO(3)
, asociada al grupo de Lie SO(3)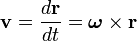




 el tensor momento de inercia. La expresión del teorema del trabajo en movimientos de rotación se puede expresar así:
el tensor momento de inercia. La expresión del teorema del trabajo en movimientos de rotación se puede expresar así:
 ).
).





 en sentido antihorario:
en sentido antihorario: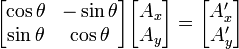






 representan los vectores posición de un punto antes y después de la operación de rotación.
representan los vectores posición de un punto antes y después de la operación de rotación. es un vector unitario que coincide con la dirección de eje de giro.
es un vector unitario que coincide con la dirección de eje de giro. es el valor del ángulo girado.
es el valor del ángulo girado. , denotan respectivamente el producto escalar y el producto vectorial.
, denotan respectivamente el producto escalar y el producto vectorial.





 que da la dirección de eje de giro.
que da la dirección de eje de giro.
 , de modo que
, de modo que 
 es una rotación plana de (1/2)π rad. La aplicación sucesiva de este operador da
es una rotación plana de (1/2)π rad. La aplicación sucesiva de este operador da  ,
,  ,
,  ,
,  , etc., con un comportamiento parecido a la unidad imaginaria (i)
, etc., con un comportamiento parecido a la unidad imaginaria (i)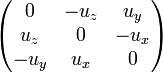
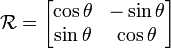
 es una rotación plana de ángulo θ. Una notación alternativa es
es una rotación plana de ángulo θ. Una notación alternativa es  (por similitud con los números complejos). La forma matricial de este
operador en los ejes cartesianos principales es particularmente
sencilla; por ejemplo, para i es:
(por similitud con los números complejos). La forma matricial de este
operador en los ejes cartesianos principales es particularmente
sencilla; por ejemplo, para i es: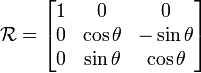
 es una rotación cónica binaria (de π rad). Una rotación cónica arbitraria de ángulo θ se puede representar con dos rotaciones binarias, perpendiculares a
es una rotación cónica binaria (de π rad). Una rotación cónica arbitraria de ángulo θ se puede representar con dos rotaciones binarias, perpendiculares a  , que da los cuatro parámetros:
, que da los cuatro parámetros: